工学部研究紹介 研究詳細

動くモノや動きのある現象を効率よく制御する技術~理論から応用まで~
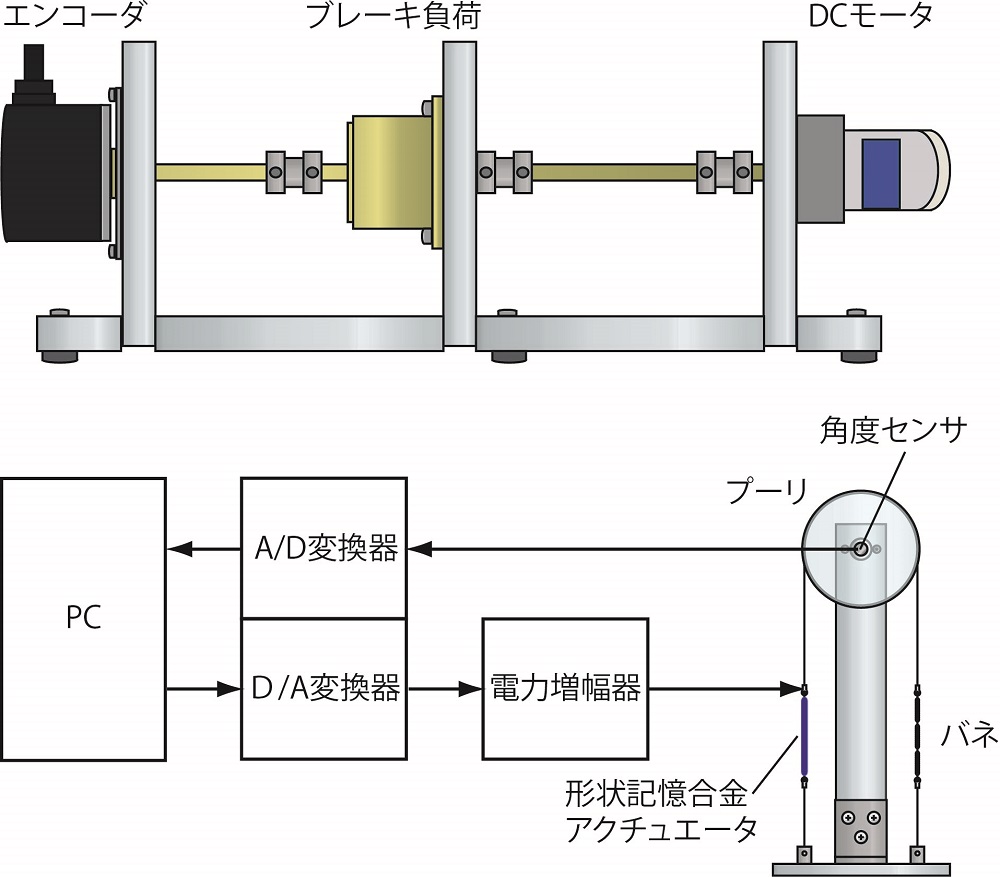 DCモータ・ブレーキ負荷・エンコーダからなるモータ制御実験装置の概観図(上)と形状記憶合金アクチュエータの制御実験システムの構成図(下)
DCモータ・ブレーキ負荷・エンコーダからなるモータ制御実験装置の概観図(上)と形状記憶合金アクチュエータの制御実験システムの構成図(下)動くモノ、例えば、自動車やロボットを効率よく動作させるには、エンジンやモータなどの要素を適切に制御する必要があります。通常、これらは電気的に制御されます。図に示すようなモータ制御の実験装置を構築し、モータを効率よく、最適に制御するための技術を研究しています。
また、モノに限らず、動きのある現象も研究対象です。例えば、人工筋肉のーつとして研究されている形状記憶合金アクチュエータには、電流を流すことで収縮する現象があります。しかし、複雑な動きをするため、容易に制御することができません。図に示すような形状記憶合金アクチュエータ実験システムを用いて、簡易でありながら有効な制御法を開発しています。
上記の他にも、インバータ、交通信号機、スマートグリッドなど、うまく制御したいモノや現象をテーマとして、理論から応用まで幅広く研究に取り組んでいます。
また、モノに限らず、動きのある現象も研究対象です。例えば、人工筋肉のーつとして研究されている形状記憶合金アクチュエータには、電流を流すことで収縮する現象があります。しかし、複雑な動きをするため、容易に制御することができません。図に示すような形状記憶合金アクチュエータ実験システムを用いて、簡易でありながら有効な制御法を開発しています。
上記の他にも、インバータ、交通信号機、スマートグリッドなど、うまく制御したいモノや現象をテーマとして、理論から応用まで幅広く研究に取り組んでいます。
若佐 裕治
Wakasa Yuji

研究関連キーワード
- システム制御理論
- 最適化理論
- システムモデリング
- 数値解析・数理モデル(含予測理論、最適化、データ解析)