工学部研究紹介 研究詳細

機械と情報の融合による制御工学の新たな展開
 制御系と情報理論における通信系との融合系
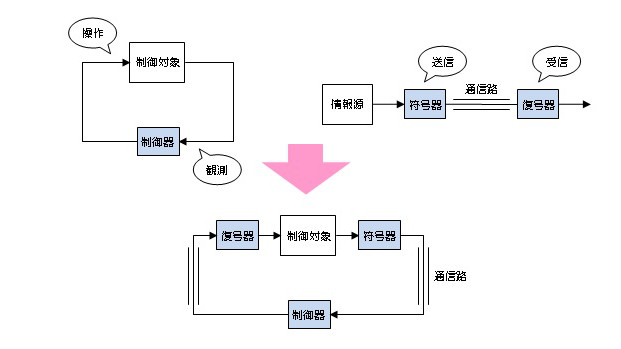
制御系と情報理論における通信系との融合系制御工学は、ロボットや自動車、航空機などの機械を動かす上で不可欠な制御則を与える学問です。制御則は人体を動かすために脳が行う判断や指令の法則に相当し、数学的に求められコンピュータに実装されます。脳が五感で得た情報を処理する場合のように、情報の抽出や伝送といった操作は制御性能を決める大きな要因になります。しかしながら、通信の分野で確立された情報理論は、実時間の信号処理や情報源へのフィードバックを伴う制御工学には適合しません。このため、情報の基本量であるエントロピーの概念を拡張し、制御理論との融合を試みています。さらに、情報理論の導入により、従来よりも広い非線形性や時変性を許容する枠組みの下で、制御系のノイズ耐性などの理論限界や最適制御則を数学的に導き出すことができます。こうした取り組みにより、機械システムのネットワーク化など情報技術の発達に対応した制御系の形態拡張を目指しています。
新銀 秀徳
Shingin Hidenori

研究関連キーワード
- 制御システム
- 制御理論
- モーションコントロール
- 情報理論